


موضع المحور الواحد/موضع اللحام التلقائي
المعايير الفنية
| موضع سيرفو أفقي أحادي المحور | موضع سيرفو من نوع الجذع الرئيسي أحادي المحور | موضع سيرفو أحادي المحور من نوع صندوق المغزل | |||||||||
| رقم سري | المشاريع | المعلمة | المعلمة | ملاحظات | المعلمة | المعلمة | المعلمة | ملاحظات | المعلمة | المعلمة | ملاحظات |
| 1. | الحمل المقدر | 200 كجم | 500 كجم | ضمن دائرة نصف قطرها R300mm/ R400mm من المحور الرئيسي | 500 كجم | 800 كجم | 1200 كجم | ضمن دائرة نصف قطرها R400mm/R500mm/ R750mm من المحور الرئيسي | 200 كجم | 500 كجم | يقع ضمن دائرة نصف قطرها R300 مم من محور المغزل داخليًا، مسافة مركز الثقل إلى الحافة ≤300 مم |
| 2. | نصف قطر الدوران القياسي | ر300 مم | ر400 مم | ر600 مم | R700 مم | R900 مم | ر600 مم | ر600 مم | |||
| 3. | أقصى زاوية دوران | ±360 درجة | ±360 درجة | ±360 درجة | ±360 درجة | ±360 درجة | ±360 درجة | ±360 درجة | |||
| 4. | سرعة الدوران المقدرة | 70 درجة/ثانية | 70 درجة/ثانية | 70 درجة/ثانية | 70 درجة/ثانية | 50 درجة/ثانية | 70 درجة/ثانية | 70 درجة/ثانية | |||
| 5 | دقة تحديد المواقع المتكررة | ±0.08 مم | ±0.10 مم | ±0.10 مم | ±0.12 مم | ±0.15 مم | ±0.08 مم | ±0.10 مم | |||
| 6 | حجم القرص الدوار الأفقي | Φ600 | Φ800 | - | - | - | - | - | |||
| 7 | البعد الحدودي لإطار الإزاحة (الطول × العرض × الارتفاع) | - | - | 2200 مم × 800 مم ×90 مم | 3200 مم × 1000 مم × 110 مم | 4200 مم × 1200 مم × 110 مم | - | - | |||
| 8 | الأبعاد الكلية لمحول الموضع (الطول × العرض × الارتفاع) | 770 مم × 600 مم × 800 مم | 900 مم × 700 مم × 800 مم | 2900 مم × 650 مم × 1100 مم | 4200 مم × 850 مم × 1350 مم | 5400 مم × 1000 مم × 1500 مم | 1050 مم × 620 مم × 1050 مم | 1200 مم × 750 مم × 1200 مم | |||
| 9 | قرص دوار للمغزل | - | - | Φ360 مم | Φ400 مم | Φ450 مم | Φ360 مم | Φ400 مم | |||
| 10 | ارتفاع مركز دوران المحور الأول | 800 ملم | 800 ملم | 850 ملم | 950 ملم | 1100 ملم | 850 ملم | 900 ملم | |||
| 11 | شروط إمداد الطاقة | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | مع محول العزل | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | مع محول العزل | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | مع محول العزل |
| 12 | فئة العزل | H | H | H | H | H | H | H | |||
| 13 | الوزن الصافي للمعدات | حوالي 200 كجم | حوالي 400 كجم | حوالي 500 كجم | حوالي 1000 كجم | حوالي 1600 كجم | حوالي 200 كجم | حوالي 300 كجم | |||
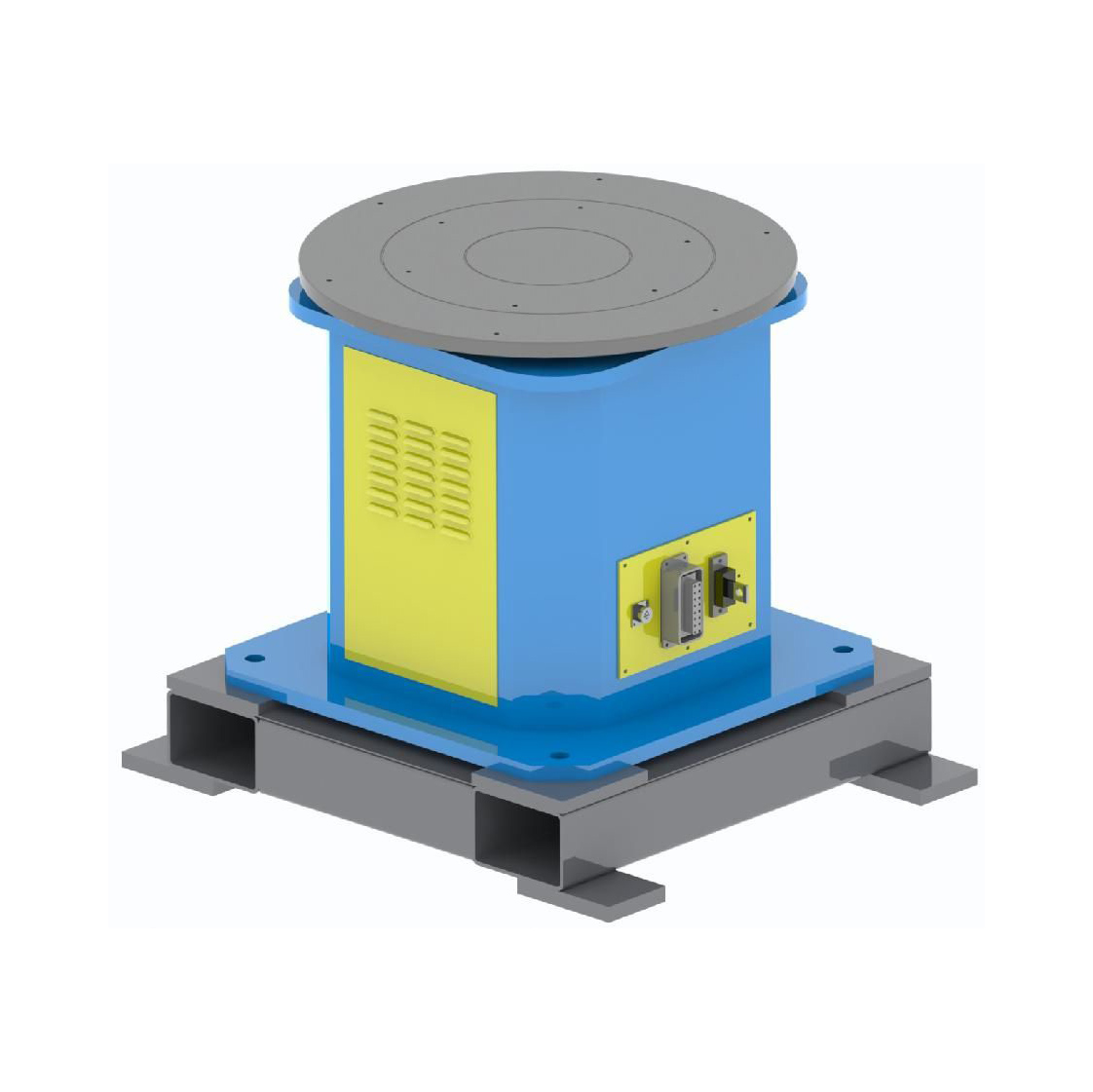
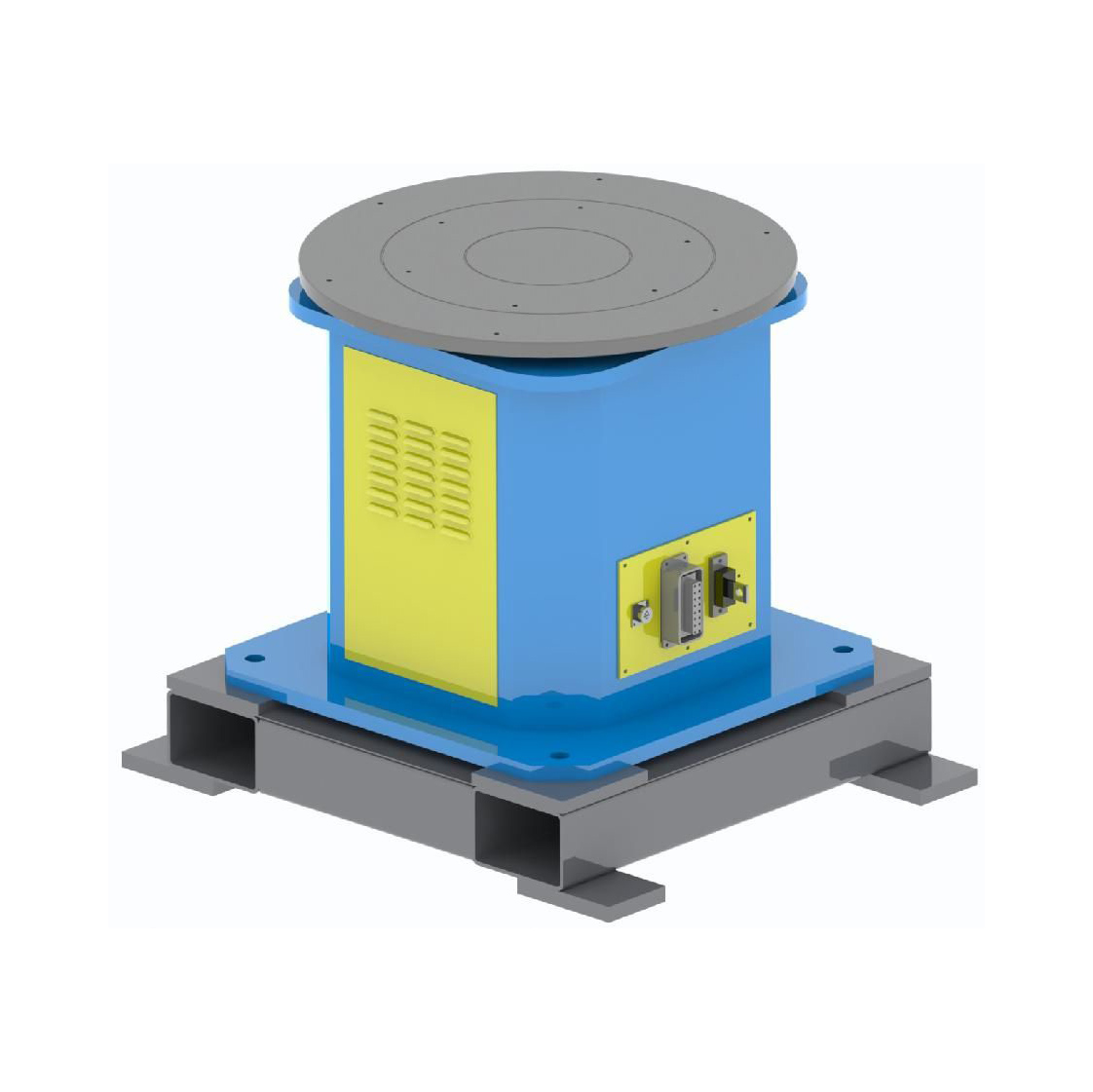
موضع سيرفو أفقي أحادي المحور

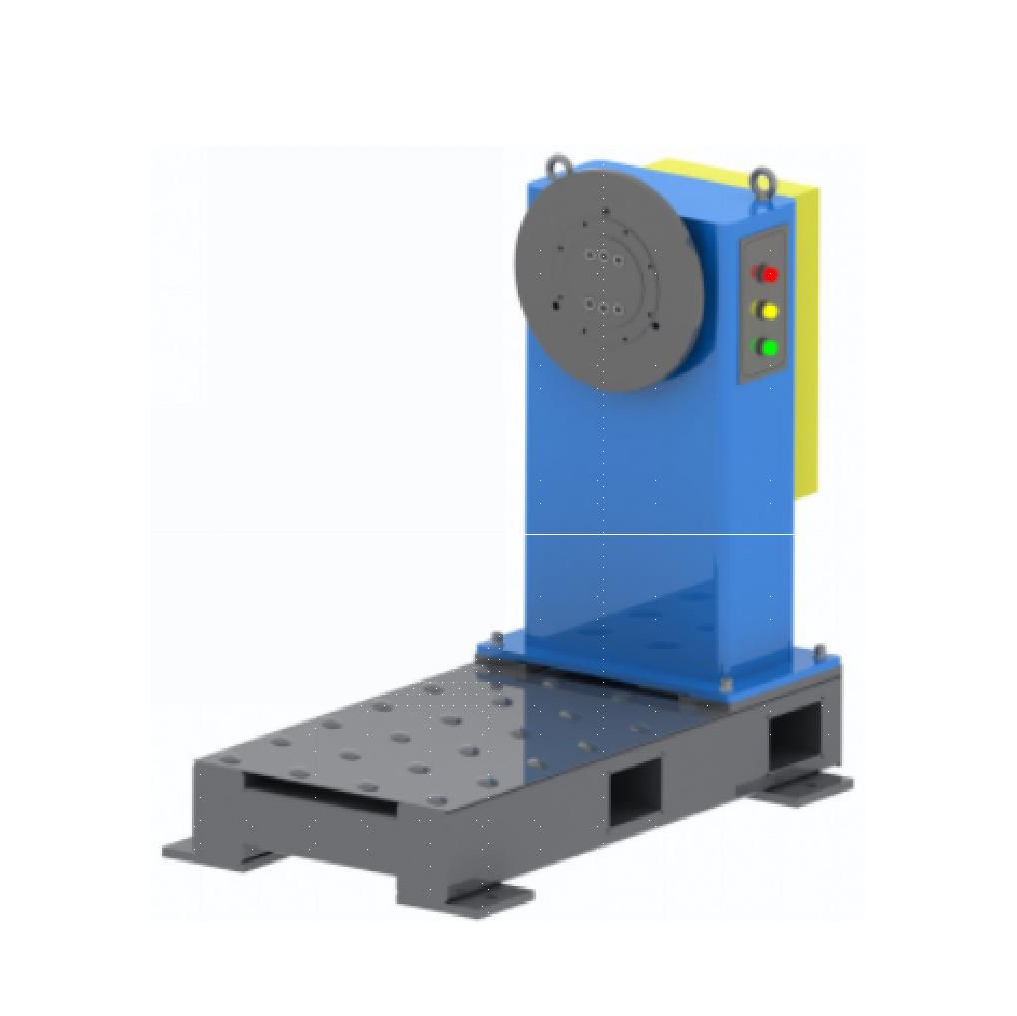
موضع سيرفو من نوع الجذع الرئيسي أحادي المحور
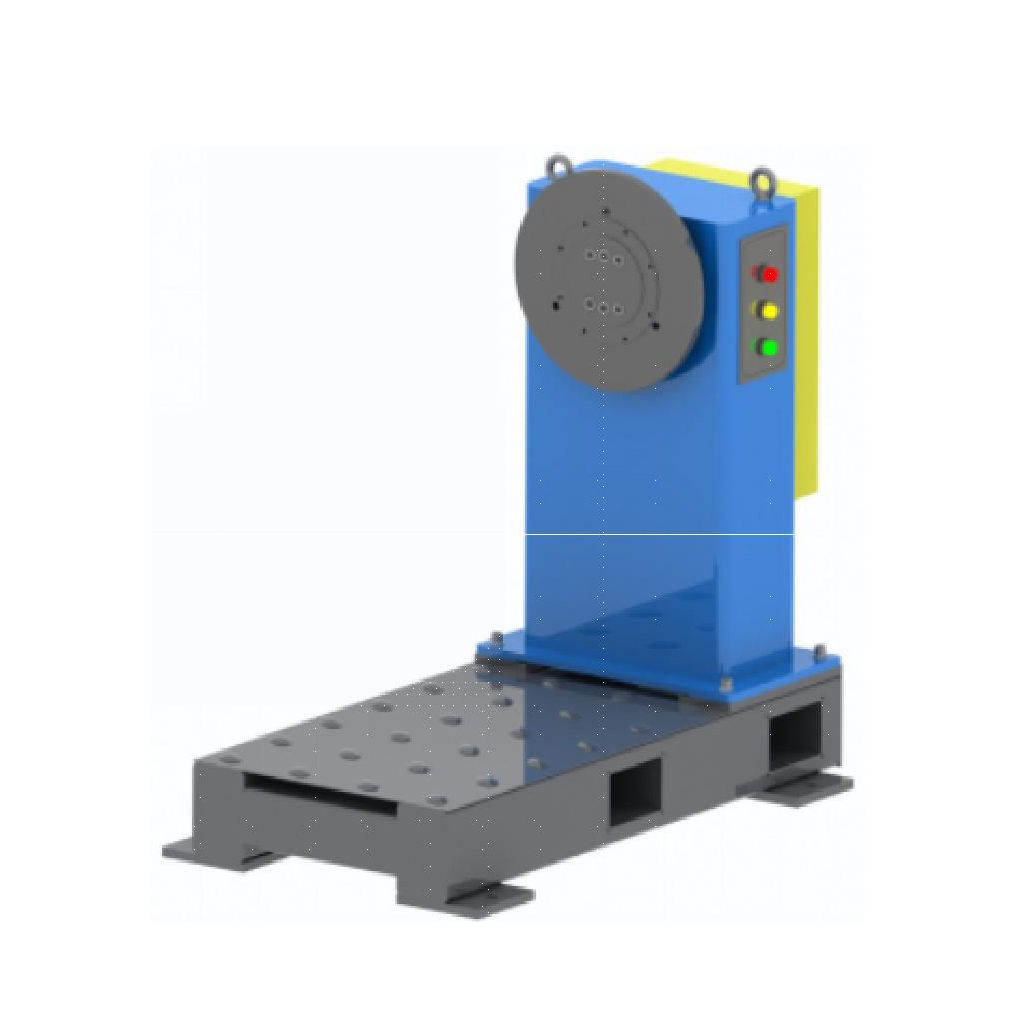
موضع سيرفو أحادي المحور من نوع صندوق المغزل
مقدمة عن الهيكل
يتكون موضع المؤازرة الأفقي أحادي المحور بشكل أساسي من قاعدة ثابتة متكاملة، وصندوق مغزل دوار، وقرص دوار أفقي، ومحرك مؤازر تيار متردد، ومخفض دقة RV، وآلية توصيل، ودرع واقٍ، ونظام تحكم كهربائي. القاعدة الثابتة ملحومة بمقاطع عالية الجودة. بعد التلدين وتخفيف الضغط، تُعالج آليًا باحترافية لضمان دقة عالية في التشغيل ودقة في تحديد مواضع المفاتيح. السطح مطلي بطلاء مقاوم للصدأ، يتميز بجماله ووفرته، ويمكن تخصيص اللون وفقًا لمتطلبات العميل.
يضمن الفولاذ عالي الجودة المُختار لصندوق المغزل الدوار متانته واستقراره طويل الأمد بعد اللحام والتلدين والتشغيل الآلي الاحترافي. يُلحم القرص الدوار الأفقي بمقاطع عالية الجودة. بعد المعالجة بالتلدين، تضمن التشغيل الآلي الاحترافي درجة تشطيب السطح واستقراره. السطح العلوي مُجهز بفتحات براغي بمسافات قياسية، مما يُسهّل على العملاء تركيب أدوات التثبيت وتثبيتها.
يضمن اختيار محرك سيرفو التيار المتردد ومخفض الجهد الكهربي (RV) كآلية طاقة استقرار الدوران، ودقة التموضع، والمتانة الطويلة، وانخفاض معدل الأعطال. صُنعت الآلية الموصلة من النحاس الأصفر، مما يتميز بتأثير توصيل جيد. تعتمد القاعدة الموصلة على عزل متكامل، مما يحمي محرك السيرفو، والروبوت، ومصدر طاقة اللحام بفعالية.
يعتمد نظام التحكم الكهربائي على وحدة تحكم PLC من Omron اليابانية للتحكم في الموضع، مما يضمن أداءً مستقرًا ونسبة فشل منخفضة. تم اختيار المكونات الكهربائية من ماركات عالمية مشهورة لضمان جودة واستقرار الاستخدام.








