



موضع الدوران الأفقي ثلاثي المحاور / موضع روبوت اللحام
المعايير الفنية
| موضع سيرفو ثلاثي المحاور ذو دوران رأسي | موضع سيرفو ثلاثي المحاور دوار أفقي | ||||||
| رقم سري | المشاريع | المعلمة | المعلمة | ملاحظات | المعلمة | المعلمة | ملاحظات |
| 1 | الحمل المقدر | 500 كجم | 1000 كجم | في دائرة نصف قطرها R400 مم من المحور الثاني | 500 كجم | 1000 كجم | ضمن دائرة نصف قطرها R400mm/R500mm من المحور الثاني |
| 2 | نصف قطر الدوران القياسي للمغزل | ر1200 مم | ر1500 مم | ر1200 مم | ر1800 مم | ||
| 3 | نصف قطر الدوران القياسي لعمود الموازن | ر400 مم | ر500 مم | ر400 مم | ر500 مم | ||
| 4 | زاوية قلب المحور الأول | ±180 درجة | ±180 درجة | ±180 درجة | ±180 درجة | ||
| 5 | زاوية دوران المحور الثاني | ±360 درجة | ±360 درجة | ±360 درجة | ±360 درجة | ||
| 6 | سرعة الارتفاع المقدرة للمحور الأول | 50 درجة/ثانية | 24 درجة/جنوبًا | 50 درجة/ثانية | 24 درجة/جنوبًا | ||
| 7 | السرعة الدورانية المقدرة للمحور الثاني | 70 درجة/ثانية | 70 درجة/ثانية | 70 درجة/ثانية | 70 درجة/ثانية | ||
| 8 | دقة تحديد المواقع المتكررة | ±0.10 مم | ±0.20 مم | ±0.10 مم | ±0.20 مم | ||
| 9 | البعد الحدودي لإطار الإزاحة (الطول × العرض × الارتفاع) | 2200 مم × 800 مم × 90 مم | 3200 مم × 1000 مم × 110 مم | 2200 مم × 800 مم × 90 مم | 3200 مم × 1000 مم × 110 مم | ||
| 10 | الأبعاد الكلية لمحول الموضع (الطول × العرض × الارتفاع) | 4000 مم × 700 مم × 1650 مم | 5200 مم × 1000 مم × 1850 مم | 4000 مم × 700 مم × 1650 مم | 4500 مم × 3600 مم × 1750 مم | ||
| 11 | ارتفاع مركز دوران المحور الأول | 1350 ملم | 1500 ملم | 800 ملم | 1000 ملم | ||
| 12 | شروط إمداد الطاقة | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | ثلاثي الطور 200 فولت ± 10% 50 هرتز | مع محول العزل | |
| 13 | فئة العزل | H | H | H | H | ||
| 14 | الوزن الصافي للمعدات | حوالي 1800 كجم | حوالي 3000 كجم | حوالي 2000 كجم | حوالي 2000 كجم | ||
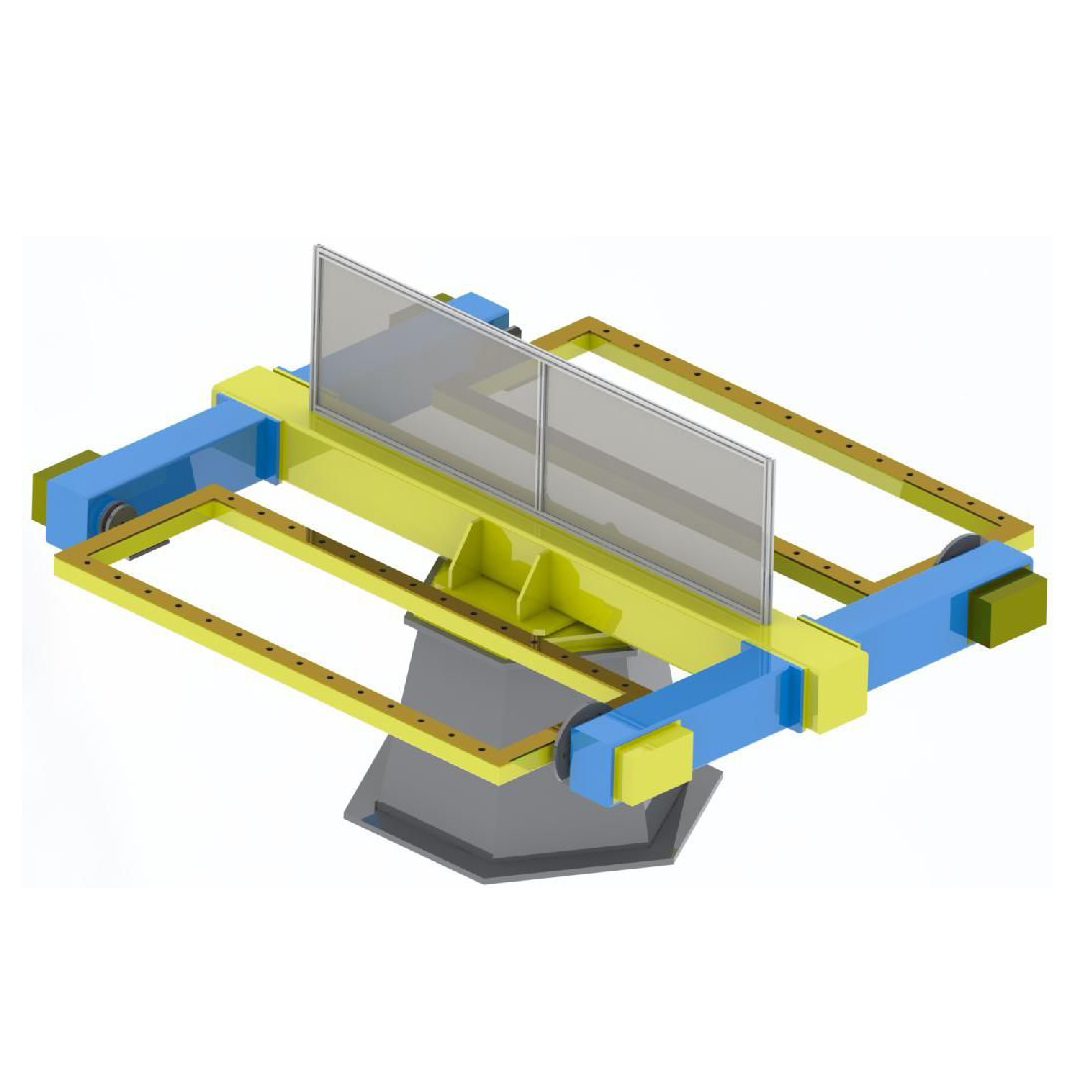
موضع سيرفو ثلاثي المحاور دوار أفقي

موضع سيرفو ثلاثي المحاور ذو دوران رأسي
مقدمة عن الهيكل
يتكون موضع المؤازرة الدورانية العمودية ثلاثية المحاور بشكل أساسي من إطار متكامل ملحوم وإطار إزاحة دوراني ومحرك مؤازر تيار متردد ومخفض دقة RV ودعم دوار وآلية موصلة ودرع واقي ونظام تحكم كهربائي.
الإطار المتكامل الملحوم مُلحوم بمقاطع عالية الجودة. بعد التلدين وتخفيف الإجهاد، يُعالَج بآلات احترافية لضمان دقة عالية في التشغيل ودقة في مواضع المفاتيح. السطح مطلي بطلاء مقاوم للصدأ، يتميز بجماله وكثافته، ويمكن تخصيص اللون وفقًا لمتطلبات العميل.
يُلحم إطار الإزاحة الدوراني بفولاذ عالي الجودة، ويُعالَج بآلات احترافية. يُجهز السطح بفتحات لولبية قياسية لأدوات التثبيت، ويُطلى ويُسوَّد ويُعالج لمنع الصدأ.
تم اختيار محرك سيرفو التيار المتردد مع مخفض RV كآلية طاقة، مما يضمن استقرار الدوران ودقة التموضع و
يتميز بمتانة طويلة ونسبة أعطال منخفضة. آلية التوصيل مصنوعة من النحاس الأصفر، مما يوفر توصيلًا جيدًا. القاعدة الموصلة مزودة بعزل متكامل، مما يحمي محرك السيرفو والروبوت ومصدر طاقة اللحام بفعالية.
يعتمد نظام التحكم الكهربائي على وحدة تحكم PLC من Omron اليابانية للتحكم في الموضع، مما يضمن أداءً مستقرًا ونسبة فشل منخفضة. تم اختيار المكونات الكهربائية من ماركات عالمية مشهورة لضمان جودة واستقرار الاستخدام.
يتم تجميع درع حجب الضوء باستخدام مقطع من الألومنيوم ولوحة بلاستيكية من الألومنيوم للحماية من ضوء القوس الناتج أثناء اللحام والقطع.








